* Информация о товарах и ценах представленных на сайте имеет информационный характер и не является публичной офертой
Модуль управления OpenCR1.0
Модуль управления OpenCR1.0.
Модуль управления OpenCR1.0 (открытого исходного кода модуля управления для ROS) - программируемый робототехнический контроллер с открытым исходным кодом со встроенным мощным MCU от ARM Cortex M-7.
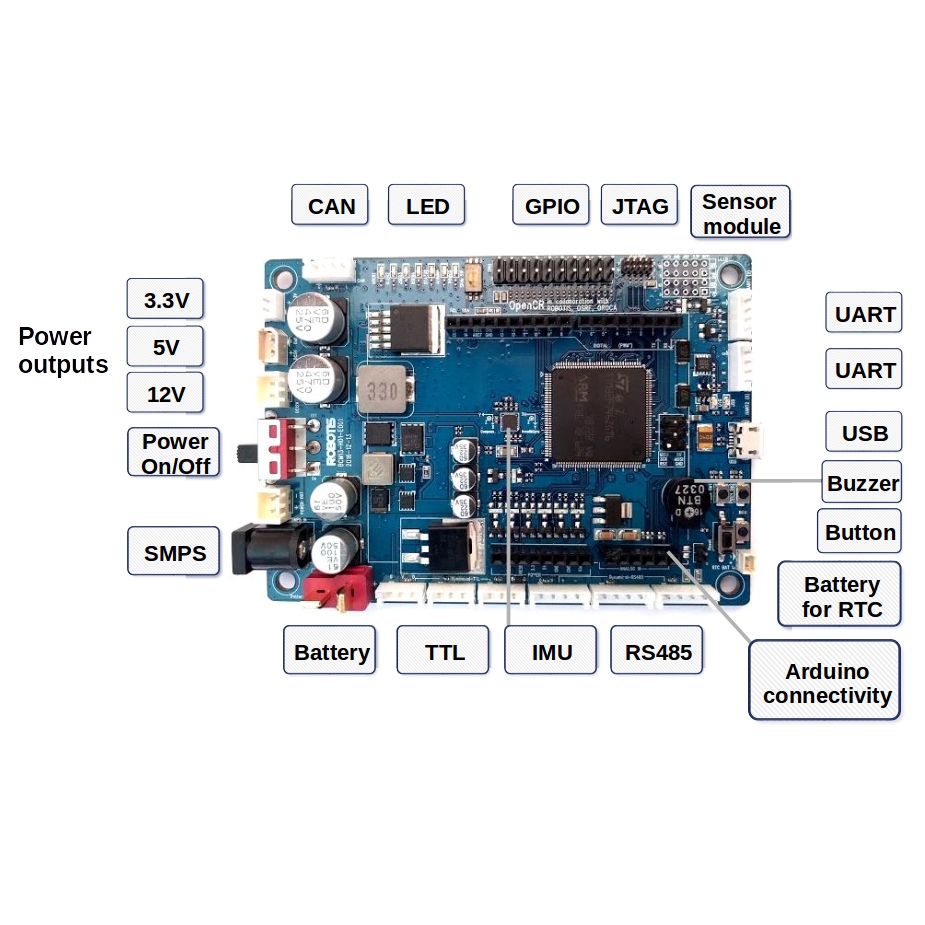
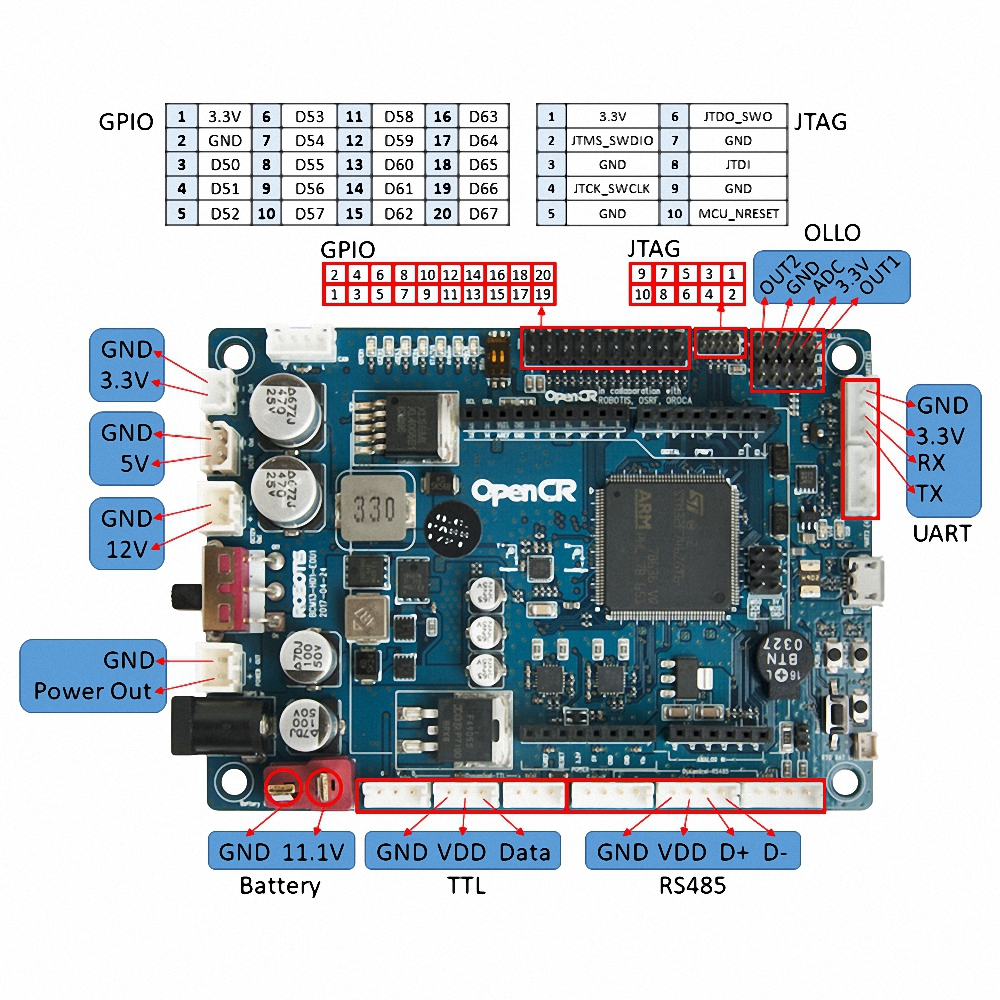
Программируемый контроллер используется в образовательной платформе ROS TurtleBot3, а все аппаратные составляющие и программный код устройства являются открытыми и доступными для общественности. Модуль управления OpenCR1.0 поддерживает интерфейсы RS485 и TTL, позволяющие управлять сервоприводами Dynamixel, а также интерфейсы UART, CAN, и инструменты разработки, такие как Arduino IDE.
При использовании совместно со встраиваемым одноплатным компьютером (например, SBC), модуль управления может работать с большей мощностью. А использование операционной системы ROS позволит максимизировать функциональность OpenCR1.0 за счет использования множества открытых программных ROS-библиотек.
Совместимые продукты
- Сервоприводы Dynamixel X-Series
- Сервоприводы Dynamixel AX/MX Series (требуется кабель Molex-JST convertible)
- Сервоприводы Dynamixel PRO Series (требуется кабель Molex-JST convertible)
- Датчики Robotis
Сопутствующие товары